
Point Clouds และการซิงโครไนซ์กับ Google Maps - 5 มีอะไรใหม่ใน Microstation V8i
ความเป็นไปได้ในการโต้ตอบกับ Google Maps และ Google Earth และการจัดการข้อมูลจากเครื่องสแกนเป็นความคาดหวังเร่งด่วนของระบบ GIS - CAD ใด ๆ ในแง่มุมเหล่านี้ไม่มีใครสงสัยว่าซอฟต์แวร์เสรีมีขั้นสูงเร็วกว่าซอฟต์แวร์ที่เป็นกรรมสิทธิ์
ตอนนี้ฉันกำลังตรวจสอบการอัปเดต Microstation V3i Select Series 8 ครั้งที่สอง (8.11.09.107) และเป็นเรื่องดีที่ทราบว่ามีความคืบหน้า มาดูข่าวที่มาทั้งซีรีส์ 3 และซีรีส์ 2:
1. การซิงโครไนซ์กับ Google Maps
ในบทความก่อนหน้านี้ที่ผมกล่าวถึง ซิงค์กับ Google Earth. ในกรณีนี้พวกเขาได้เพิ่มฟังก์ชันการทำงานอีกหนึ่งฟังก์ชันที่ช่วยให้มุมมองปัจจุบันของไฟล์ dgn / dwg ซิงโครไนซ์กับ Google แผนที่และยังสามารถเลือกระดับการซูมเพิ่มเติมได้
นี้จะทำตั้งแต่ เครื่องมือ> ภูมิศาสตร์> เปิดตำแหน่งใน Google แผนที่
ก่อนที่จะคลิกบนหน้าจอจะปรากฏหน้าต่างแบบลอยตัวซึ่งจะช่วยให้เราสามารถเลือกระดับการเข้าถึงได้ซึ่งสามารถตั้งแต่ 1 ถึง 23
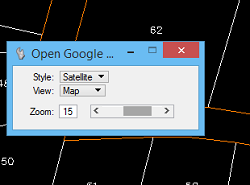
นอกจากนี้ยังสามารถเลือกมุมมองซึ่ง ได้แก่ แผนที่ถนนหรือการจราจร
และคุณยังสามารถเลือกรูปแบบแผนที่ไฮบริดโล่งอกหรือดาวเทียม
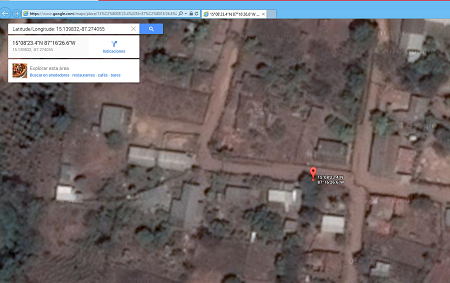
เป็นผลให้ระบบเปิดขึ้นในเบราเซอร์อินเทอร์เน็ตโดยมีการติดตั้งที่เลือกไว้
มันไม่เลว แต่ก็ยากที่จะเข้าใจว่าทำไมมันไม่ง่ายเท่ากับการเพิ่มเลเยอร์ใหม่ ... เท่าที่ฉันรู้มันเป็นสิ่งต่อไปที่พวกเขาจะทำในเวอร์ชันถัดไป
2. มุมมองที่บันทึกไว้
เป็นฟังก์ชันการทำงานเหมือนกับโปรแกรม CAD / GIS อื่น ๆ ที่มีมานานแล้วซึ่งช่วยอำนวยความสะดวกในการบันทึกการเข้าถึงโดยตรงไปยังการปรับใช้เฉพาะ ด้วยความแตกต่างอย่างมากที่ Bentley ใช้ตัวเลือกการกำหนดค่ามุมมองซึ่งเป็นไปได้ที่จะกำหนดว่าเลเยอร์ใดที่จะใช้งานประเภทของวัตถุที่มองเห็นได้มุมมองของมุมมองและสิ่งอื่น ๆ
แม้จะเป็นไปได้ที่จะกำหนดว่าไฟล์ใดที่เรียกว่าการอ้างอิงและสภาวะการมองเห็น

3. รองรับ Realdwg จาก AutoCAD 2013
เรารู้ว่า 2013 AutoDesk แก้ไขไฟล์ซึ่งจะใช้ได้กับ AutoCAD 2014 และ AutoCAD 2015
Microstation Select Series 3 สามารถเปิดแก้ไขและบันทึกไฟล์ประเภทนี้ได้แบบ natively
ด้วยเหตุนี้ข้อตกลงกับ AutoDesk ถือเป็นความสำเร็จที่ยอดเยี่ยมซึ่ง OpenSource ทั้งหมดไม่สามารถรักษาได้ ไม่ถึงกับนำเข้ามากน้อยในการแก้ไขโดยกำเนิด
4. การสนับสนุน Point Cloud
นี่เป็นคุณสมบัติที่เริ่มต้นด้วย Select Series 2 แม้ว่าในรุ่นใหม่จะได้เพิ่มการปรับปรุงการใช้งาน
คุณสามารถจัดการกับจุดในรูปแบบ:
TerraScan BIN, Topcon CL3, Faro FLS, LiDAR LAS, Leica PTG - PTS - PTX, Riegl 3DD - RXP - RSP, ASCII xyz - txt, Optech IXF, ASTM e57 และแน่นอน Pointools POD เทคโนโลยีที่ประสบความสำเร็จนี้หลังจากได้มาในช่วงหลายปีที่ผ่านมา
5. รองรับการพัฒนาในสภาพแวดล้อมเสมือนจริง
การจำลองเสมือนของเซิร์ฟเวอร์เป็นปัญหาล่าสุด แต่ได้เติบโตขึ้นในการทำงานเนื่องจากขณะนี้เรามีการควบคุมที่ดีกว่าความไว้วางใจและการเชื่อมต่อบรอดแบนด์
ด้วยเหตุนี้จึงเป็นไปได้ที่เซิร์ฟเวอร์หลายเครื่องจะแชร์กระบวนการโอนเซสชันที่เปิดอยู่และกระจายความจุไปยังเซิร์ฟเวอร์อื่นโดยไม่จำเป็นต้องมีอยู่จริงเหมือนเมื่อ 10 ปีก่อน ดังนั้นบริการต่างๆเช่นสิ่งที่ GeoWeb Publisher หรือ Geospatial Server สามารถอยู่ในระบบคลาวด์ของเซิร์ฟเวอร์ได้โดยไม่ต้องกลัวว่าจะอิ่มตัวหรือไม่จำเป็นต้องมีความพิเศษอันเนื่องมาจากการที่กระบวนการล้าสมัยมากเกินไป
โดยทั่วไปเราพบว่าความแปลกใหม่ของ Microstation V8i น่าสนใจในซีรีส์ที่สาม แม้ว่าบางประเด็นของปัญหาภูมิสารสนเทศจะช้ากว่าพลังงาน OpenSource เสมอ แต่ในระดับของการใช้งานแนวตั้งในวิศวกรรมโรงงานอุตสาหกรรมและวิศวกรรมโยธาก็ยังคงเป็นเกณฑ์มาตรฐานที่สำคัญในการสร้างสรรค์นวัตกรรมอย่างยั่งยืน



